六自由度摇摆台,目标仿真模拟设备,六自由度模拟地震平台
六自由度摇摆台,目标仿真模拟设备,六自由度模拟地震平台

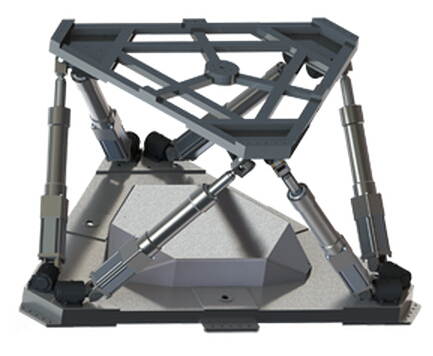
1:系统组成
六自由度平台系统由Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。下平台安装在地面的固定基座基上,上平台为支撑平台。计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。
各主要部分简述如下:
1)运动平台
上平台:连接需要被模拟动作的机构
上铰链:双回转轴的虎克铰结构,用于连接上平台与电动缸的活塞杆。
下铰链:单虎克铰结构,用于连接固定基座与电动缸的筒体。
下平台:安装固定基座。
2)计算机控制系统硬件
运动控制计算机(伺服控制单元):实现平台系统启动/停止、接收上位机发来的位姿控制信息、对电动缸进行运动控制、监控伺服电机驱动器的工作状态、监控系统的运动状态、完成故障处理以及安全保护工作。
信号调理单元:完成与平台系统运动状态相关的各种传感器信号、测试信号和数字I/O信号的调理,以及伺服驱动器的驱动等。
3)系统控制软件
运动控制计算机的软件包括运动控制软件和逻辑控制软件。
2:系统工作原理
平台的工作原理如图2.1所示。控制系统为分层控制结构,监控单元负责人机界面交互,接受用户操作指令。并将控制信号下达给实时控制计算机。
图2.1 系统原理框图
首先,用户输入期望的运动参数(运动平台位姿、速度或加速度),如X向正弦运动。该运动参数传输给运动控制计算机,运动计算机通过运动学反解计算出六个电动缸的运动参数(电动缸位移量);然后,运动计算机根据六支电动缸运动参数和六个电动缸的位移反馈量,驱动六个伺服驱动器,实现六个电动缸闭环位置控制,使六个电动缸达到所要求的位移量,那么运动平台也就达到了所期望的运动姿态。
六自由度运动平台,由于有极为广阔的应用前景,六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。
售后说明及建议
1.本产品自出厂出货日起,在正常使用情形下(即非人为损坏)保修一年。
2.若因人为因素或其它不正常使用所造成之损坏,慨不在保修范围内。
3.本产品出厂后严禁自行拆卸,一经拆卸慨不负保修责任。
企业单位购买六自由度平台,三自由度平台,六自由度运动平台,三自由度运动平台,设备请联系佛山市依时利新科技有限公司。
佛山市依时利新科技有限公司
佛山总部
联系人:秦先生
手机:13928227857